Lab 1
For this lab, you will be learning about visual odometry for localization in autonomous driving.
You will be working on Lab 1 Visual Odometry for Localization in Autonomous Driving.ipynb in the Lab_1_Visual_Odometry folder.
Lab slide: https://docs.google.com/presentation/d/1OTk-OZ3WpI3GGFyi72uSnF-Kz955AfWvQNAKOmSy1pU/edit?usp=sharing
Launch Notable here https://noteable.edina.ac.uk/login
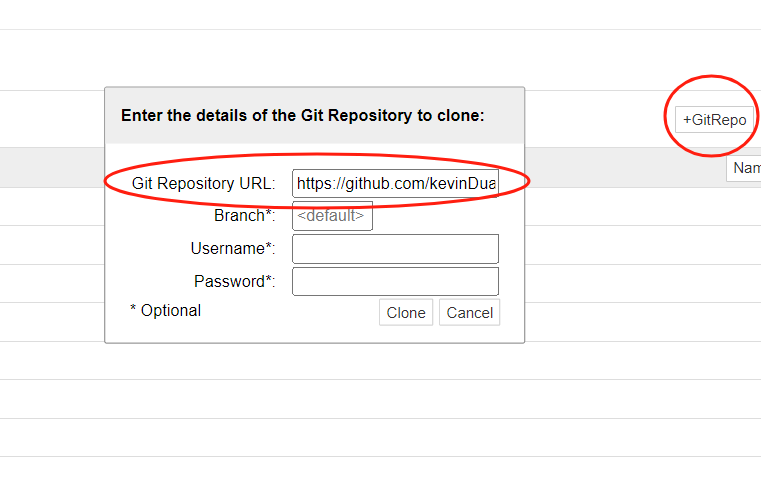
clone our repo: https://github.com/kevinDuan1/MOB-23-UoE.git
Lab 2
For this lab, you will be learning about object detection in autonomous driving with YOLO model.
You will be working on Lab 2 Object Detection with CARLA.ipynb in the Lab_2_Object_Detection folder.
Please follow the guidelines below for setting up Labs on Noteable.
Lab slide: https://docs.google.com/presentation/d/1dFvyayyz8zosSBRhvR53y7IeDw97_Uwb8EB4gWxOBvI/edit?usp=sharing
Lab 3
For this lab, you will be learning about semantic segmentation in autonomous driving.
You will be working on Lab 3 Image Segmentation .ipynb in the Lab_3_Semantic_Segmentation folder.
Please follow the guidelines below for setting up Labs on Noteable.
Lab 4
For this lab, you will be learning about Recursive State Estimation and Kalman filter.
You will be working on Lab 4 Recursive State Estimation in the Lab_4_Recursive_State_Estimation folder.
Please follow the guidelines below for setting up Labs on Noteable.
Lab 5
For this lab, you will be learning about occupancy grid generation using lidar scanner measurements from a moving vehicle.
You will be working on Lab 5 Occupancy Grid Generation.ipynb in the Lab_5_Occupancy_Grid_Populating folder. Please follow the guidelines below for setting up Labs on Noteable.